
Pada tutorial kali ini kita akan coba memahami cara kerja lengan robot.
A. Bagian Mekanik

Sistem minimal dari sebuah robot setidaknya terdiri dari 4 atau 5 servo:
- Base servo : Bagian alas memutar kekanan atau kekiri
- Shoulder servo : Bagian lengan yang bergerak keatas atau kebawah
- Elbow servo : Bagian siku robot fungsinya sama seperti lengan robot
- Wrist Servo : Bagian pergelangan tangan bergerak keatas dan kebawah
- Grip Servo : Bagian servo yang berfungsi untuk menjepit benda kerja
B. Bagin Elektronik
- Simulasi Skema Rangkaian
Komponen utama yang kita gunakan adalah :
- Arduino UNO R3
- Potensio 10k
- Mini Servo motor
Kali ini kita coba mengatur putaran servo menggunakan potensiometer dengan sudut 0 s/d 180 untuk 1 buah servo misalnya untuk Base Servo

Sekarang silahkan ketikkan program berikut pada aplikasi Arduino

Sekarang tinggal kita simulasikan menggunakan proteus seperti gambar dibawah:

- Klik Play di sudut kiri bawah
- Untuk melihat perputaran motor servo tinggal klk (+) servo berputar kekanan 180 dan klik(-) sebaliknya
Lengan robot minimal 4 buah servo, untuk gambarnya bisa kita tambahkan 3 servo lagi seperti gambar dibawah:

Selanjutnya tinggal tambahkan beberapa code program :


Keterangan :









SELAMAT MENCOBA

Selanjutnya tinggal tambahkan beberapa code program :
Dan lakukan simulasi kembali :

- Servo 1 : Base Servo
- Servo 2 : Shoulder Servo
- Servo 3 : Elbow/ Wrist servo
- Servo 4 : Grip servo
- Layout PCB
Pembuatan layout bisa menggunakan beberapa aplikasi PCB. Disini penulis menggunakan PCB Artis 4.0 yang belum punya silahkan download disini

Langkah Kerja:
- Buka dulu PCB Artis klik File>New

- Klik Next

- Atur ukuran PCB

- Beri nama PCB

- Klik Add Komponen yang ada logo IC pilih library discrete>RA-POT>add

- Klik Library Conector>3WP>add dan 2WP dan susun komponen seperti contoh gambar. Untuk putar komponencukup tekan R di keyboard

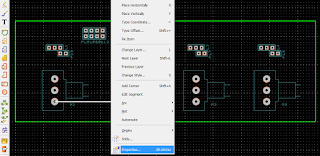
- Klik Add Track dan klik kanan garis dan pilih properties

- Atur seperti gambar

- Selanjutnya klik salah satu garis dan pilih Add track dan lanjutkan sampai selesai

1 komentar:
Write komentarTerima kasih atas pembelajarannya
ReplySemoga berhasil dan bermanfaat
Aamiin
EmoticonEmoticon